Regulace otáček a reverzace asynchronních elektromotorů | Elektrotechnika a elektrická zařízení
Regulace otáček asynchronních motorů se provádí několika způsoby. Vzorec pro otáčky asynchronních motorů:
(7.7), kde s je skluz ve zlomcích jednotky, což ukazuje, že rychlost otáčení lze regulovat změnou proudové frekvence f, počtu pólových párů p a skluzu s.
Regulace otáček změnou skluzu asynchronního elektromotoru je možná dvěma způsoby:
- zavedením dodatečného odporu do obvodu rotoru, což je možné u motorů s fázovým rotorem;
- změnou reaktivních odporů (saturačních tlumivek) obsažených ve statorovém vinutí.
Regulace otáček asynchronních elektromotorů s fázovým rotorem zavedením dodatečného odporu do jejich obvodu umožňuje snížit jejich otáčky prakticky ne více než 40-50% jmenovitých otáček.
Při takové regulaci se se zvyšujícím se odporem reostatu zvyšuje hodnota skluzu, tj. snižuje se počet otáček motoru. V tomto případě je regulační obvod podobný spouštěcímu obvodu asynchronního elektromotoru s fázovým rotorem (viz obr. 7.8) s tím rozdílem, že nastavovací reostat musí být navržen pro dlouhodobé proudové zatížení. Regulace otáček pomocí přídavného odporu v obvodu rotoru vede k nestabilnímu provozu elektromotoru při nízkých otáčkách, protože je nutné zahrnout velké odpory, což vede k výrazným kolísáním otáček při malých změnách momentu odporu zátěže. Tato metoda navíc není příliš ekonomická, protože zvyšuje ztráty v obvodu rotoru.
Popsaný způsob regulace asynchronních elektromotorů s fázovým rotorem se používá v případech, kdy je provoz elektromotoru při snížených otáčkách krátkodobý a kdy není vyžadována vysoká přesnost regulace, například pro regulaci rychlosti pohybu mechanismů zdvihacích a dopravních zařízení.
Regulace otáček asynchronních elektromotorů pomocí saturačních tlumivek spočívá v zapojení reaktivních odporů s proměnnou indukčností do statorového obvodu elektromotoru. Změna indukčnosti reaktivních odporů (tlumivek) se dosahuje průchodem stejnosměrného proudu různé velikosti vinutím regulační tlumivky (obr. 7.13, a).
Proměnný indukční odpor ve statorovém obvodu elektromotoru umožňuje dosáhnout různých napětí na svorkách stroje (obr. 7.13, b), čímž se dosáhne změny skluzu, tj. rychlosti otáčení rotoru. Výhodou popsané metody je plynulá regulace rychlosti otáčení elektromotoru; nevýhodou je výrazný pokles maximálního točivého momentu, jakož i snížení účiníku a účinnosti elektromotoru.
Rychlost otáčení asynchronního elektromotoru se reguluje změnou počtu pólových párů přepínáním vinutí statoru a je stupňovitá. Pro tyto účely se používají speciální asynchronní vícerychlostní elektromotory, vyráběné průmyslem a určené pro 2, 3 a 4 rychlosti. Například čtyřrychlostní elektromotor může mít synchronní rychlosti otáčení 500, 750, 1000 a 1500 ot/min.

Obr. 7.13. Schéma zapojení pro zapínání a regulaci otáček asynchronních motorů s rotorem veverkové klece pomocí saturačních tlumivek:
a — schéma zapojení; b — mechanické vlastnosti

Obr. 7.14. Přepínání vodičů pro změnu směru otáčení asynchronního motoru
Nejjednodušší způsob, jak změnit počet pólových párů, je instalovat dvě nezávislá vinutí na stator asynchronního elektromotoru. Takové elektromotory se vyrábějí se synchronními otáčkami 1000/1500 ot/min.
Dvourychlostní motory mají šest, třírychlostní motory devět a čtyřrychlostní motory mají dvanáct svorek k pólovému měniči.
Regulace otáček asynchronního elektromotoru změnou frekvence proudu vyžaduje použití speciálního zdroje střídavého proudu s proměnnou frekvencí. Tato metoda dosud nenašla uplatnění pro regulaci otáček elektrických pohonů stavebních strojů, ale je velmi slibná při použití pro statické frekvenční měniče řízených polovodičových tyristorových ventilů, jejichž výroba se v současné době vyvíjí (tyristory viz kapitola 10).
Změna směru otáčení asynchronního motoru – reverzace se dosáhne změnou směru otáčení magnetu
pole. K tomu stačí prohodit libovolné dva vodiče třífázového systému, které dodávají proud do statoru motoru. Obrázek 7.14 znázorňuje schéma takového prohodování. Při prohodování tří vodičů se směr otáčení magnetického pole statoru, a tedy ani rotoru motoru, nezmění.
§ 7.9. Energetické ztráty a účinnost asynchronních elektromotorů. Účiník motorů
Elektrická energie spotřebovaná během provozu asynchronního elektromotoru se vynakládá na užitečnou mechanickou práci a na pokrytí ztrát: elektrických, magnetických a mechanických.
Ztráty v mědi nebo elektrické ztráty jsou způsobeny ohřevem vinutí statoru a rotoru při průchodu proudu. Ztráty v oceli (magnetické ztráty) se skládají ze ztrát vířivými proudy a ztrát přemagnetizací v ocelových částech statoru a rotoru. Ztráty vířivými proudy jsou úměrné druhé mocnině frekvence proudu a ztráty přemagnetizací jsou úměrné první mocnině frekvence proudu. Magnetické ztráty se vyskytují hlavně ve statoru. Ztráty v oceli rotoru jsou zanedbatelné kvůli nízké frekvenci jeho proudu, a proto je lze zanedbat.
Mechanické ztráty se skládají ze spotřeby energie na tření v ložiskách, tření rotoru o vzduch a vzduchu ve ventilačním systému elektromotoru. Tyto ztráty závisí na rychlosti otáčení rotoru, jeho průměru, typu ložisek a konstrukci ventilačního systému motoru.
Koeficient účinnosti (účinnost) motoru je poměr užitečného mechanického výkonu P3 na hřídeli motoru k vynaloženému výkonu spotřebovanému ze sítě P1.  (7-8)
(7-8)
Protože rozdíl mezi vynaloženým a užitečným výkonem se rovná ztrátám, lze vzorec pro výpočet účinnosti motoru zapsat následovně:  (7.9)
(7.9)
kde pm je ztráta mědi nebo elektrická ztráta; rs je ztráta oceli nebo magnetická ztráta;
Rmech – mechanické ztráty.
Ztráty mědi jsou proměnné a závisí na zatížení, protože s rostoucím proudem se zvyšuje zrání vinutí.
Ztráty v železe (magnetické) a mechanické ztráty jsou konstantní, protože nezávisí na zatížení.
Účinnost motoru se mění v závislosti na zatížení.
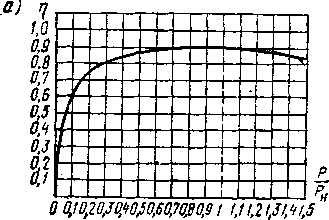
Účinnost dosahuje nejvyšší hodnoty při zatížení přibližně 0,75 jmenovité hodnoty a poté, s rostoucím zatížením, účinnost klesá v důsledku zvýšení elektrických ztrát v důsledku ohřevu vinutí (obr. 7.15, a).
Velký magnetický odpor vzduchové mezery mezi statorem a rotorem asynchronního motoru má za následek značný magnetizační (jalový) proud, který je přibližně 0,4–0,7 jmenovitého proudu elektromotoru. V této souvislosti motor vždy pracuje s cos φ menším než jedna. Při plném zatížení dosahuje účiník cos φ motorů maximální hodnoty 0,8–0,9 (obr. 7.15, b).
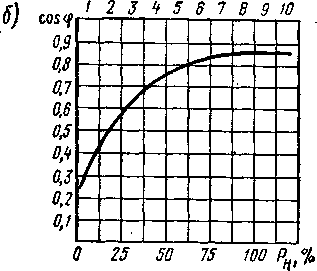
Obr. 7.15. Závislost účiníku asynchronního motoru na jeho zatížení
S klesajícím zatížením se snižuje účiník, což se vysvětluje nízkou závislostí magnetizačního (jalového) proudu na zatížení. Síla proudu motoru se skládá ze dvou hodnot: činného proudu, který závisí na zatížení, a jalového proudu, který je na zatížení nezávislý. Proto při mechanickém nedostatečném zatížení činný proud klesá a v důsledku toho se zvyšuje relativní hodnota jalového proudu, což vede ke snížení účiníku cos φ.